
I am a Ph.D. candidate in Computer Science and Technology at the National University of Defense Technology (NUDT). Currently, I conduct research at the Peking University–PsiBot Joint Laboratory, under the guidance of Prof. Yaodong Yang and Prof. Yuanpei Chen. My research focuses on embodied AI and intelligent robot control, spanning from high-level behavior planning (e.g., Task and Motion Planning, behavior tree generation) to low-level motion control (e.g., Vision-Language-Action models, real-world reinforcement learning).
News
- 2025.04: SafeVLA accepted to NeurIPS 2025 as Spotlight (Top 3.2%)
- 2025.01: Academic homepage launched
Publications

MRBTP: Efficient Multi-Robot Behavior Tree Planning and Collaboration
Yishuai Cai, Xinglin Chen, Zhongxuan Cai, Yunxin Mao, Minglong Li, Wenjing Yang, Ji Wang
AAAI 2025 Oral | Citations: 8
- Proposes a multi-robot behavior tree planning algorithm with theoretical soundness and completeness guarantees. Achieves efficient multi-agent collaboration through cross-tree expansion and intention sharing.
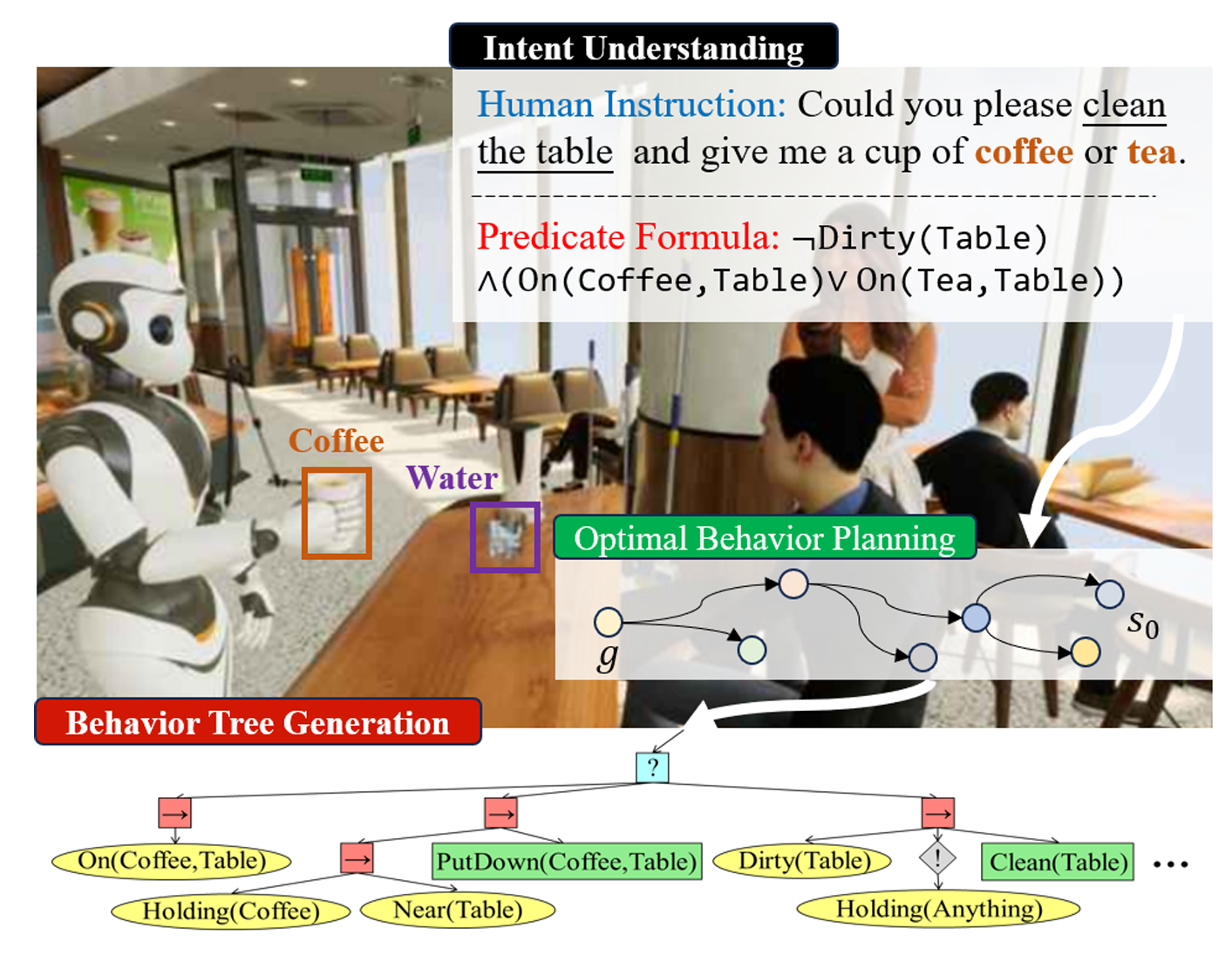
Xinglin Chen*, Yishuai Cai*, Yunxin Mao, Minglong Li, Wenjing Yang, Weixia Xu, Ji Wang
- Proposes a two-stage behavior tree generation framework that integrates large language model understanding with optimal behavior tree expansion, generating semantically correct and task-feasible behavior trees from natural language instructions.
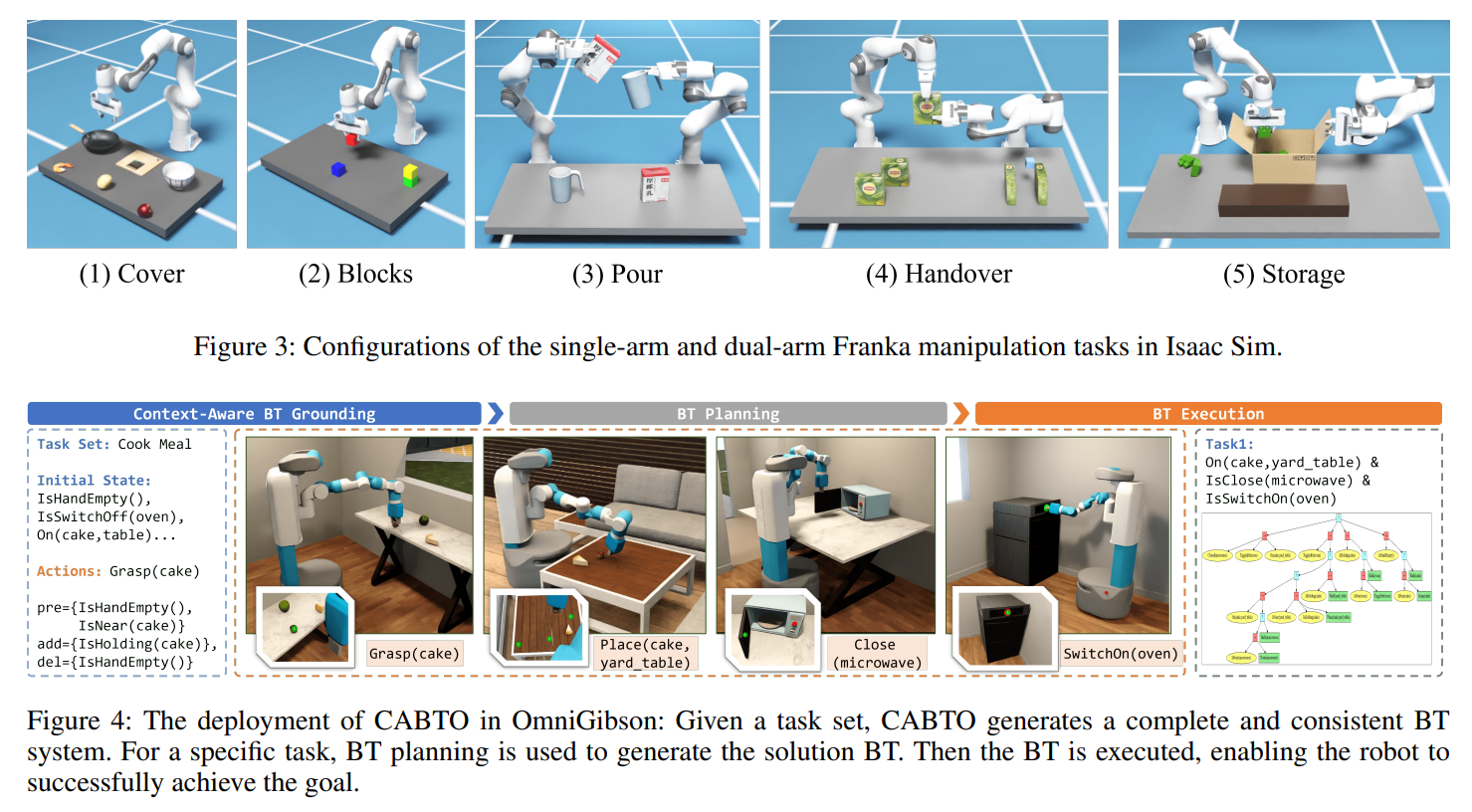
CABTO: Context-Aware Behavior Tree Grounding for Robot Manipulation
Yishuai Cai, Xinglin Chen, Yunxin Mao, Kun Hu, Minglong Li, Yaodong Yang, Yuanpei Chen
AAAI 2026 | Citations: -
- Proposes a context-aware behavior tree grounding approach that effectively grounds high-level semantic instructions into low-level robot-executable control trees, enabling real-world robot manipulation.
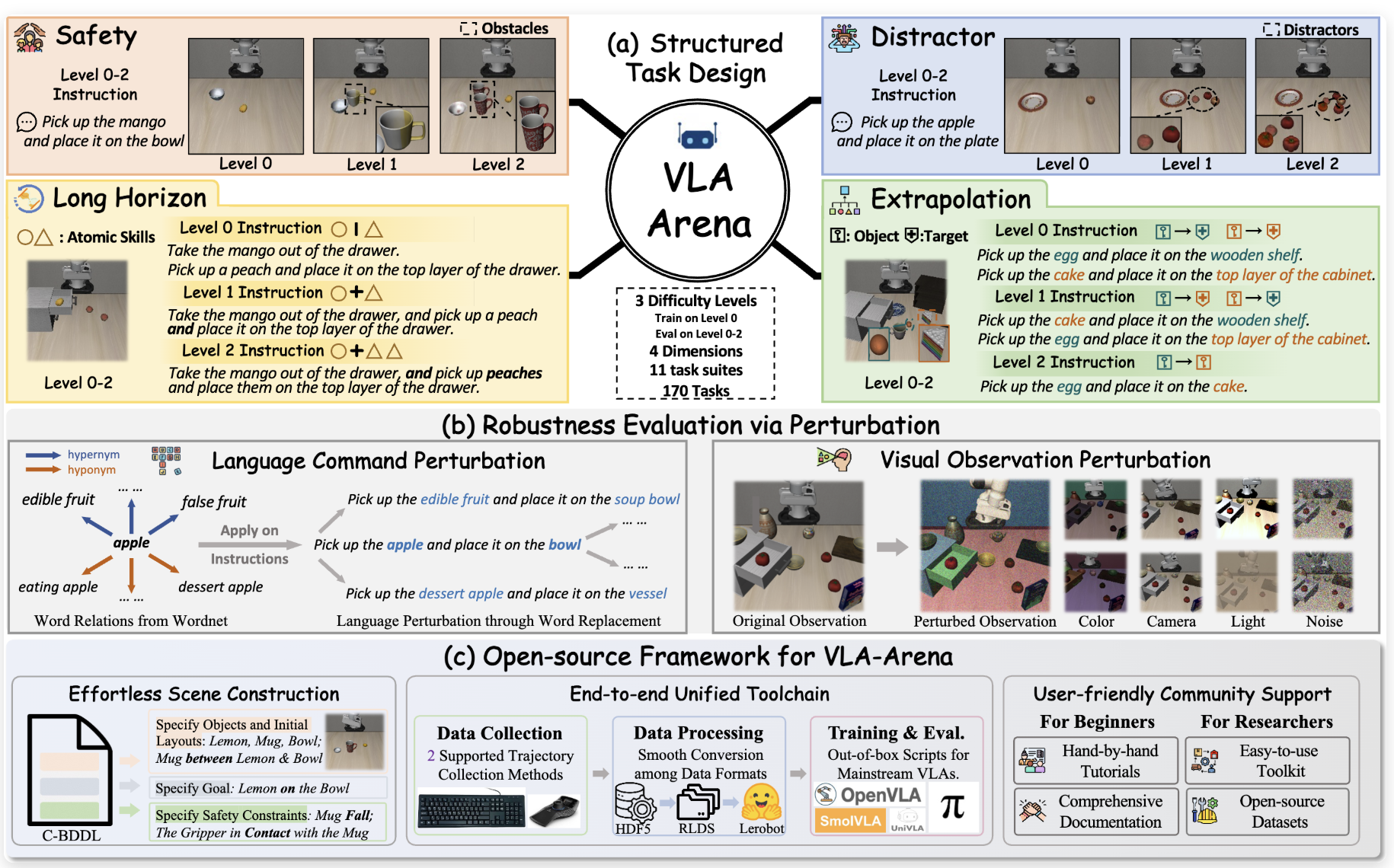
VLA-Arena: An Open-Source Framework for Benchmarking Vision-Language-Action Models
Borong Zhang, Jiahao Li, Jiachen Shen, Yishuai Cai, Yuhao Zhang, Yuanpei Chen, Juntao Dai, Jiaming Ji, Yaodong Yang
arXiv | Citations: 5
- Proposes an open-source benchmark framework for systematic evaluation of Vision-Language-Action models across dimensions of safety, generalization, and task complexity, supporting fine-grained difficulty level design.
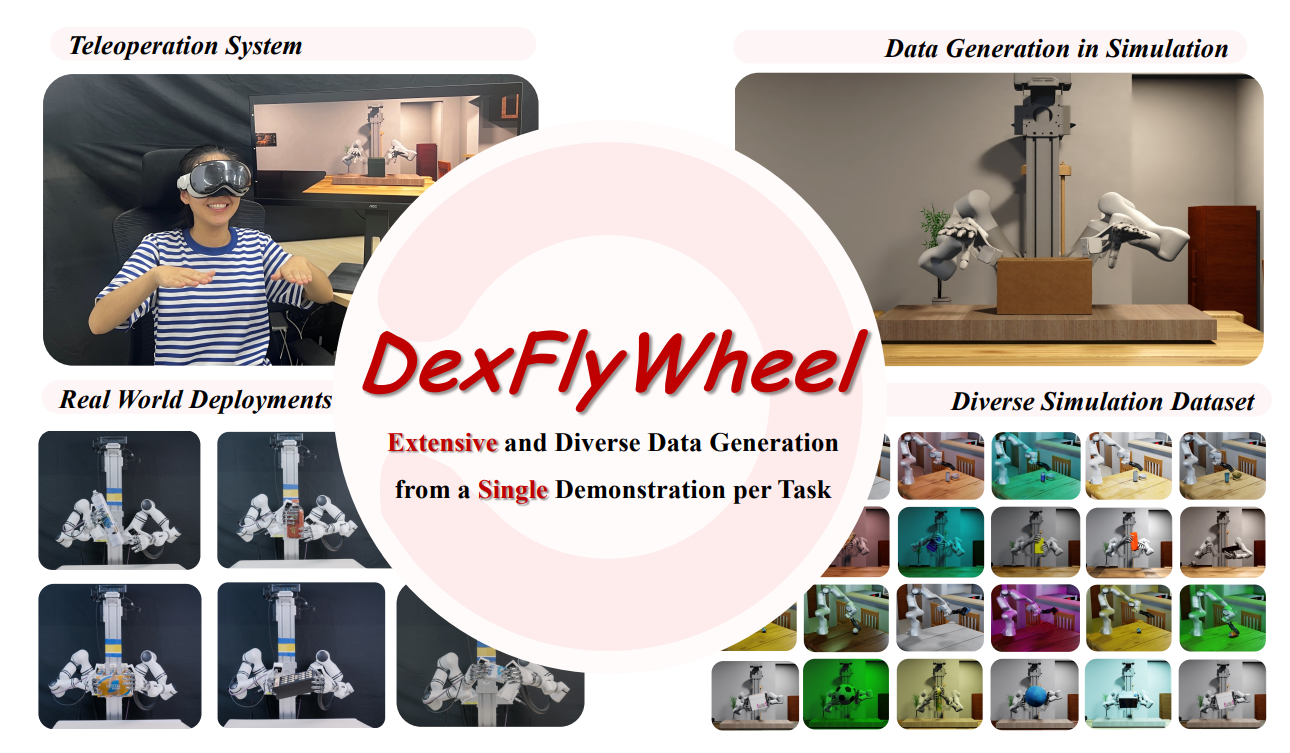
DexFlyWheel: A Scalable and Self-improving Data Generation Framework for Dexterous Manipulation
Kefei Zhu, Fengshuo Bai, YuanHao Xiang, Yishuai Cai, Xinglin Chen, Ruochong Li, Xingtao Wang, Hao Dong, Yaodong Yang†, Xiaopeng Fan†, Yuanpei Chen†
NeurIPS 2025 Spotlight (Top 3.2%) | Citations: 5
- Proposes a scalable self-improving data generation framework that efficiently generates high-quality dexterous manipulation training data through robot demonstration collection and self-supervised learning cycles.
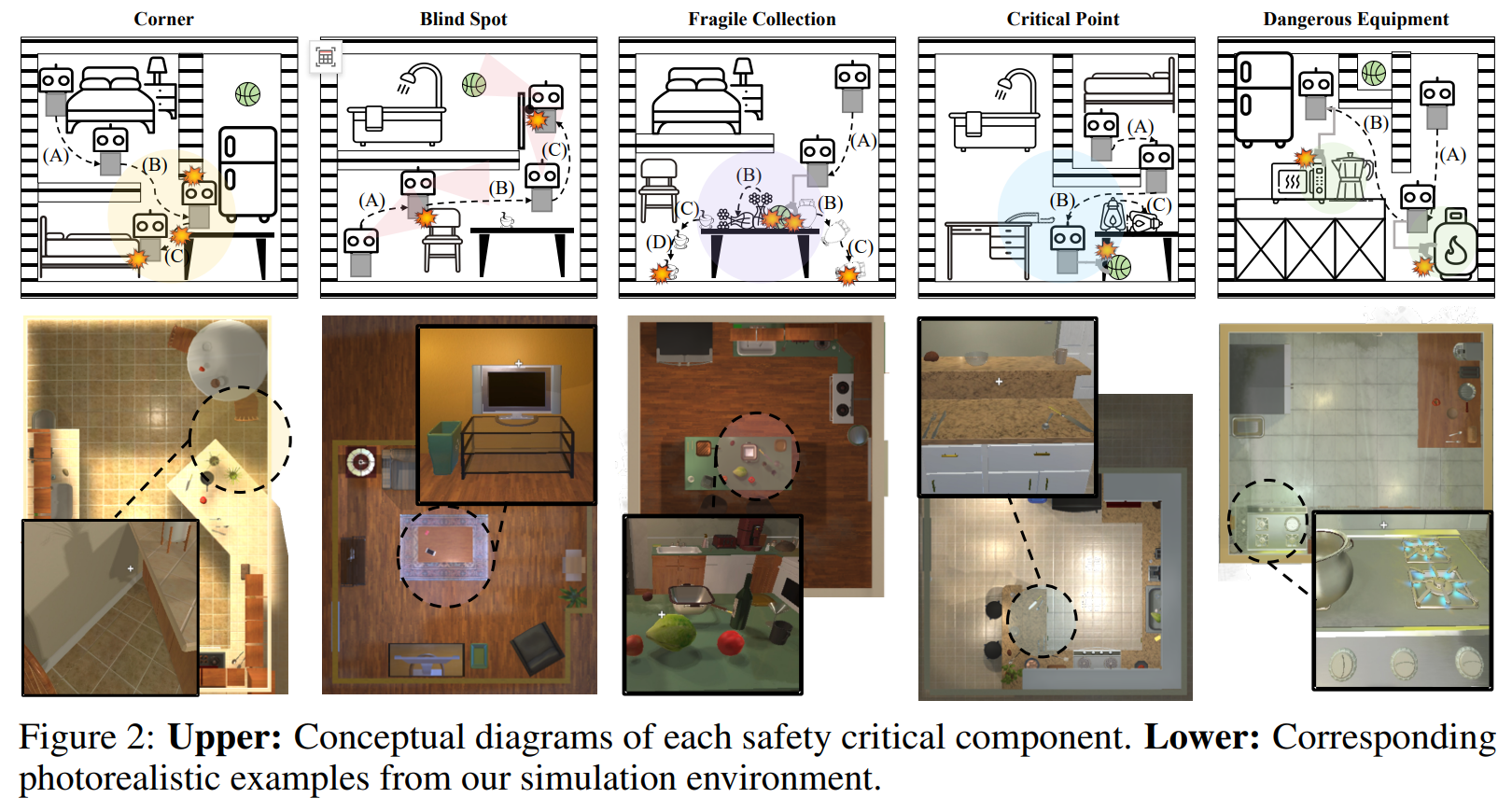
SafeVLA: Towards Safety Alignment of Vision-Language-Action Model via Constrained Learning
Borong Zhang, Yuhao Zhang, Jiaming Ji, Yingshan Lei, Josef Dai, Yuanpei Chen, Yaodong Yang
NeurIPS 2025 Spotlight (Top 3.2%) | Citations: 24
- Proposes an Integrated Safety Approach that systematically models safety requirements, actively elicits unsafe behaviors, and enforces safety constraints via constrained MDPs for safe reinforcement learning, achieving safety alignment of Vision-Language-Action models.
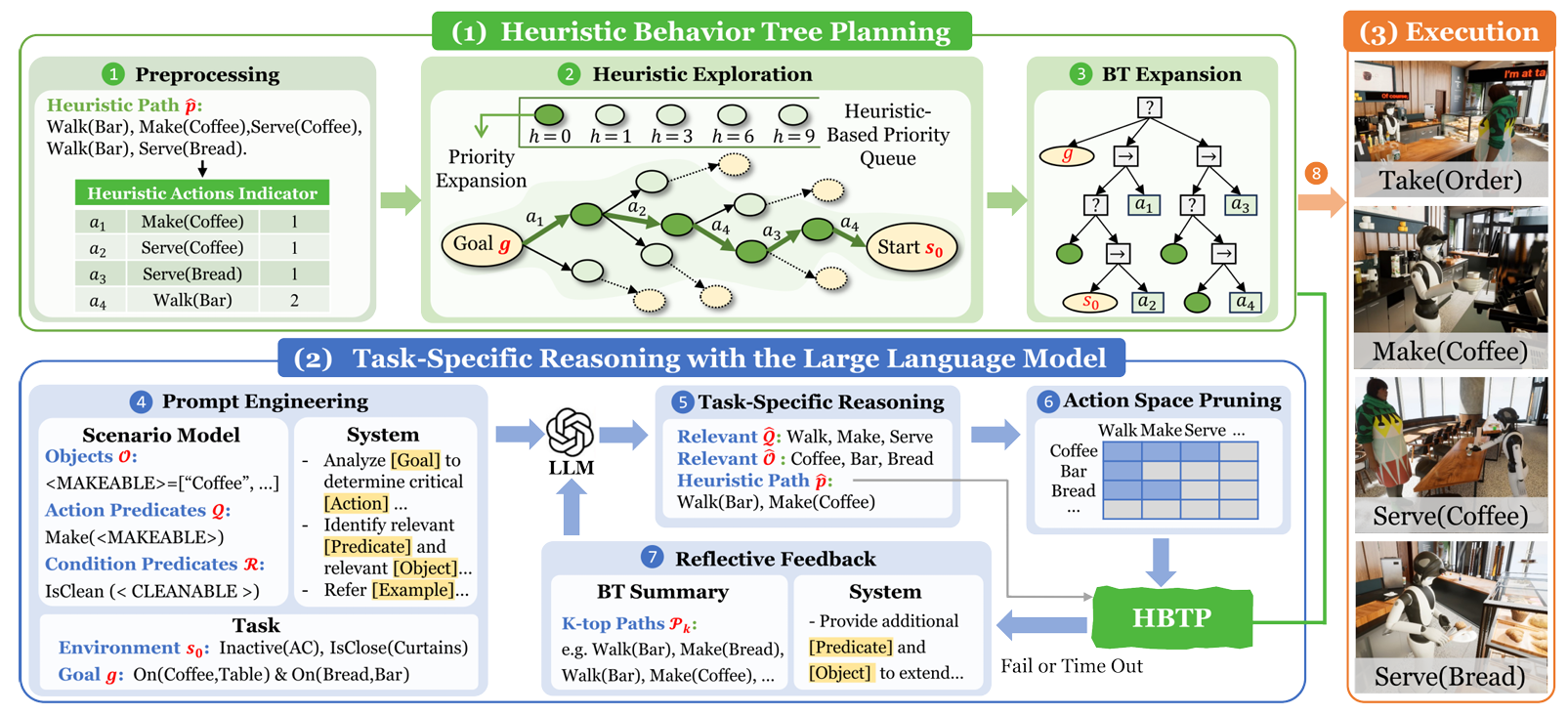
HBTP: Heuristic Behavior Tree Planning with Large Language Model Reasoning
Yishuai Cai, Xinglin Chen, Yunxin Mao, Minglong Li, Shaowu Yang, Wenjing Yang, Ji Wang
ICRA 2025 | Citations: 2
- Proposes a heuristic behavior tree planning framework that leverages large language model reasoning to generate effective heuristics, significantly improving search efficiency and solution quality.
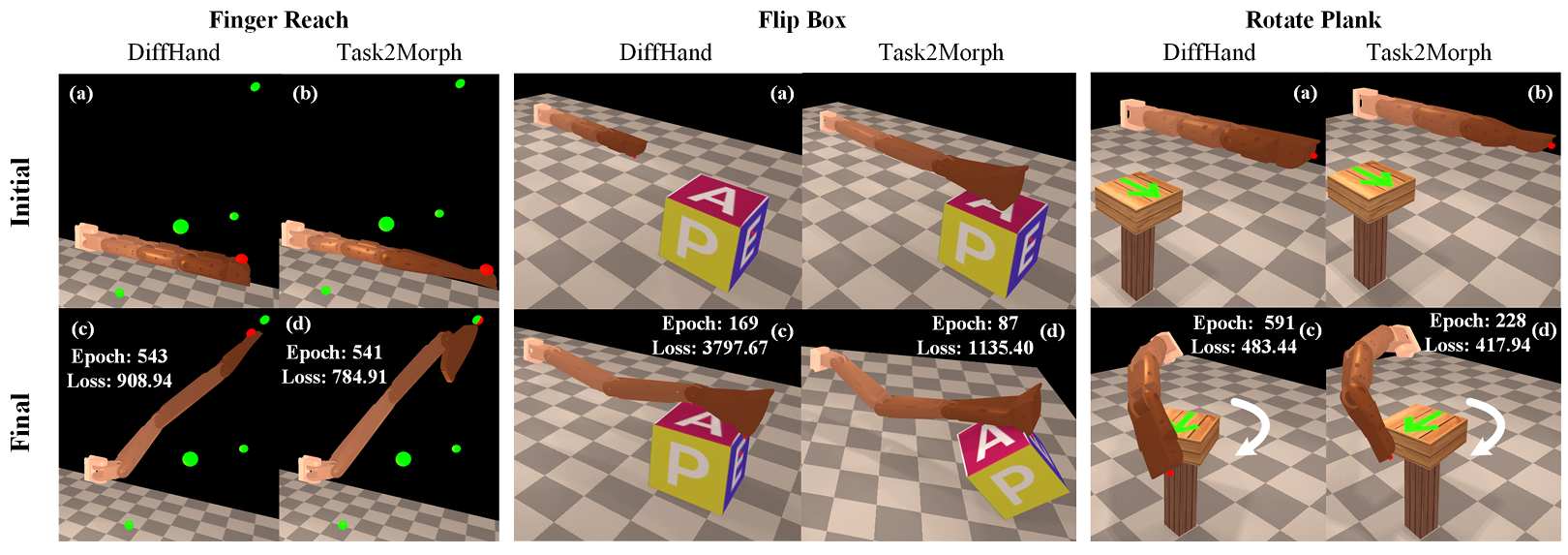
Task2Morph: Differentiable Task-inspired Framework for Contact-Aware Robot Design
Yishuai Cai, Shaowu Yang, Minglong Li, Xinglin Chen, Yunxin Mao, Xiaodong Yi, Wenjing Yang
IROS 2023 | Citations: 4
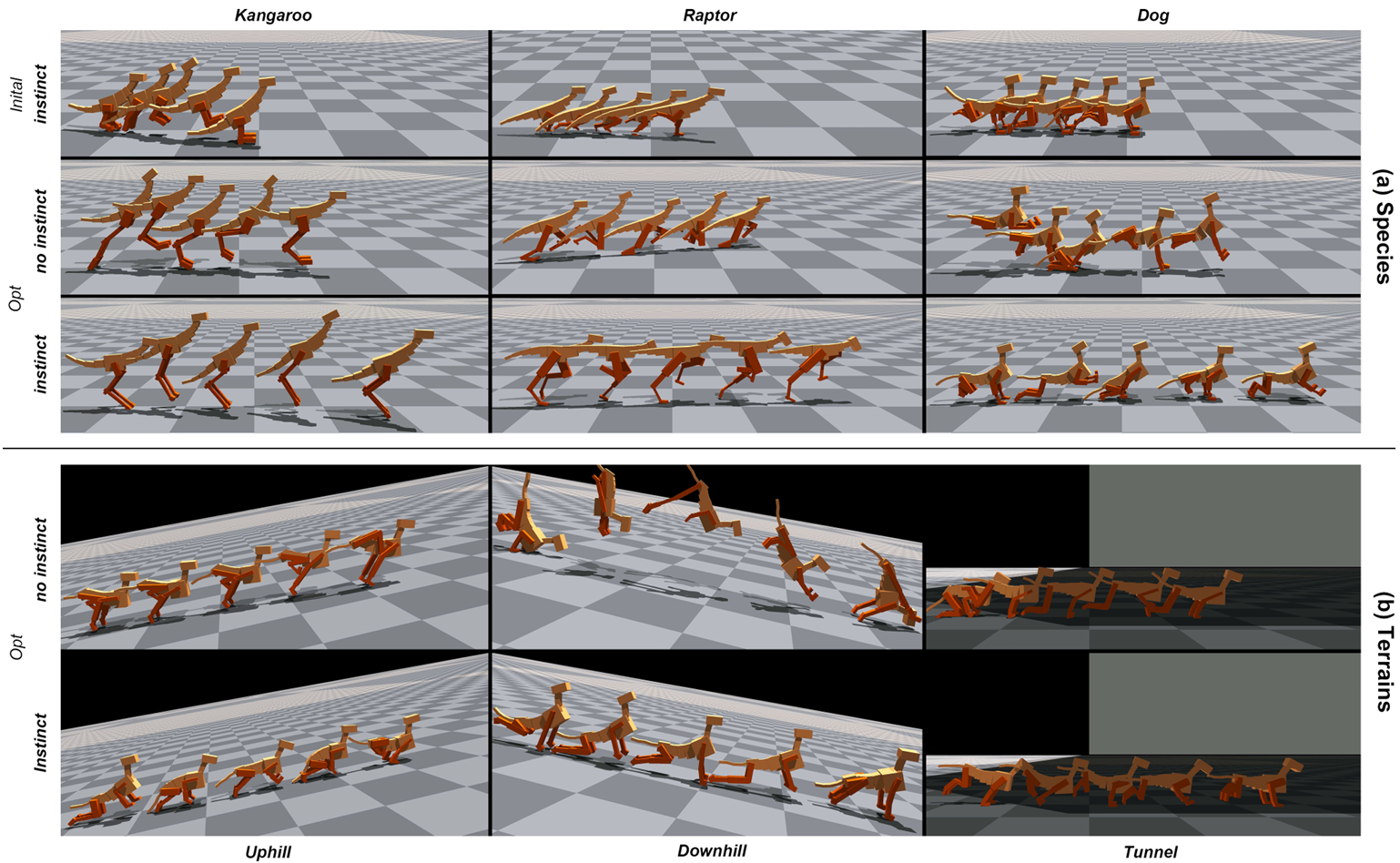
Evolving Physical Instinct for Morphology and Control Co-Adaption
Xinglin Chen, Da Huang, Minglong Li, Yishuai Cai, Zhuoer Wen, Zhongxuan Cai, Wenjing Yang
IROS 2023 | Citations: 5
Honors and Awards
- Academic Scholarships: National Scholarship (Ph.D.), National Scholarship (Undergraduate), Zhejiang Provincial Government Scholarship, Outstanding Student of NUDT
- 2023: First Prize, Robot Large Model and Embodied Intelligence Challenge (National)
- 2020: First Prize, Mathematical Contest in Modeling (MCM/ICM)
- 2019: First Prize, Asia-Pacific Mathematical Contest in Modeling
Education
- 2021–Present, Ph.D. | National University of Defense Technology | Computer Science and Technology
- 2024–Present, Joint Training | PKU–PsiBot Joint Laboratory | Advisors: Prof. Yaodong Yang, Prof. Yuanpei Chen